研究開発
研究開発テーマ
センシングツールを用いたロボットの自律制御
#事業部門・生産技術部門 #生産技術 #省エネ #安全・安心 #IoT
-
視覚による製品形状と座標認識
-
触覚による軌跡生成と速度制御
-
熟練難作業工程へのロボット適用
人間の五感のうち視覚や触覚に相当するセンシング情報を用いたロボットの自律制御技術を開発し、従来は熟練者でなければこなせなかった難作業の自働化を進めています。
動作軌跡生成や速度制御などの機能を独自プラットフォーム化したので、対象となる工程ごとに異なるロボットにこの機能が付加できます。この技術により生産ラインの生産性が向上し製品の品質も向上します。

変形しやすい薄物大物板金組立を視覚認識により自働化
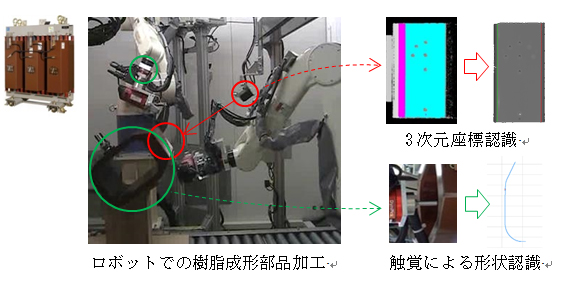
大型樹脂成形品の機械加工を視覚と触覚により自働化