シェア
富士電機製品コラム
基礎から学ぶサーボモータの仕組み

基礎から学ぶサーボモータの仕組み
ロボットや工場の自動化に必須のアイテム
いま注目を浴びているサーボモータとは一体どんなモータ?
私たちの日常生活を振り返ると、そのほとんどにモータが利用されていることに気づくでしょう。実は、世界で消費される電力のうち、モータが占める割合だけで約45%もあるというから驚きです。ただし、モータと一口に言っても、プラスチックモデルに付いている玩具のような小型モータから、発電所のポンプなどに使われる巨大なモータまで、様々な種類があります。
世の中には、こういった誰でも知っている汎用モータのほかにも、工場の製造ラインなどに使われるような特殊なモータもあります。その1つが「サーボモータ」と呼ばれる産業用モータです。では、サーボモータは、私たちが目にする汎用モータと比べて、どのように違うのでしょうか?
そもそもサーボモータの「サーボ」という語源は、「召使い」という意味の「Servant」(ラテン語ではServus)に由来すると言われています。ご主人が何か指示を出すと、それに従って召使いが忠実に働いてくれるようなイメージを想像すると分かりやすいかもしれません。
例えば、自動車製造工場で稼働する産業用ロボットは、部品をピッキングしたり、溶接したり、塗装したり、常に同じ動作を正確に繰り返しながら、大量の自動車を作り出しています。ロボットに内蔵されているサーボモータに指示を出すと、決められた位置や速度や回転力(トルク)で忠実に動いてくれます。
そのため、いまやサーボモータは、超高速や超精密な制御を行う産業機械の構成要素として、必要不可欠なものになっています。例えば、前出の産業用ロボットはもちろん、工作機械、電子部品の実装装置、半導体・液晶製造装置、射出成形機、ラベル包装機、プレス機械、医療機器など、様々な利用シーンで大活躍しているのです。
サーボモータとセットになった重要な構成要素とは?
サーボモータは、過酷な環境で何度も起動と停止を繰り返しながら動くため、一般的なモータよりも信頼性が高く、壊れないような構造になっています。かつては直流で動くDCサーボモータが使われていましたが、現在は交流で動くACサーボモータが主流になっています。DCサーボモータには「ブラシ」という機械式なスイッチがありました。しかし、ブラシの定期的な交換や、摩耗による粉塵の発生などがあり、保守性や信頼性に問題があったのです。
そこで、いまはブラシのないACサーボモータが、ほとんどの場合において採用されるようになりました。ACサーボモータの内部は「ロータ」と、その周りに配置された「ステータ」で構成されています。
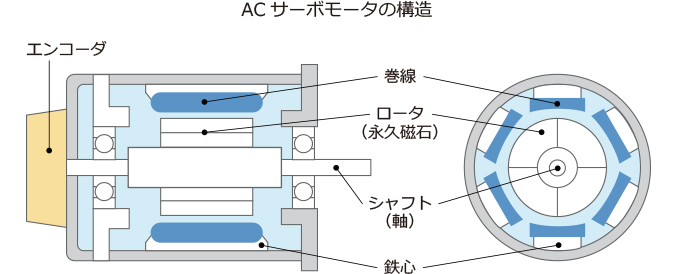
ステータ(固定子)は、コアとなる鉄心の周りに電線が巻き付けられたものです。電線に電流が流れると、ステータの中は電磁石になります。交流は電流の向きと大きさが交互に変わるため、電磁石もそれに伴ってN極とS極に切り替わります。一方、ロータはモータの軸にあたる部分で、そこにもN極とS極の強力な永久磁石が埋め込まれています。
ACサーボモータのステータに交流が流れると、各コアが時間によってN極やS極になります。そして、ロータの永久磁石(N極やS極)を引き付けたり、あるいは反発させたりしながら、ロータを回転させるのです。
なお、最近のACサーボモータは、全体がコンパクトになり、慣性(回転しづらさ)を小さくすることで、ロータが素早く回転できるように工夫が凝らされています。
また、ロータの後側には回転センサである「エンコーダ」が付いています。このエンコーダの内部には、スリットが刻まれた円盤と、光センサがあります。ロータとエンコーダの円盤は連結されているため、動いたスリットの数を光センサでカウントし、電気信号に変換することで、回転時の位置や速度を検出する仕組みです。
サーボモータが動く仕組みは?フィードバック信号とは何か?
前述のように、サーボモータは正確かつ素早く回転する機械ですが、モータ単体だけでは何もできません。モータを動かすためには、司令塔の役割を果たす「プログラマブルコントローラ(PLC)」と、実際にサーボモータを動かす「サーボアンプ」(ドライバ)が基本的には必要です。サーボアンプは、容量ごとに異なるサーボモータの性能を最大限に発揮できるようにチューニングされているため、メーカーによって両者がセットで販売されることが一般的です。
では、具体的にサーボモータは、どのような仕組みで動くのでしょうか?
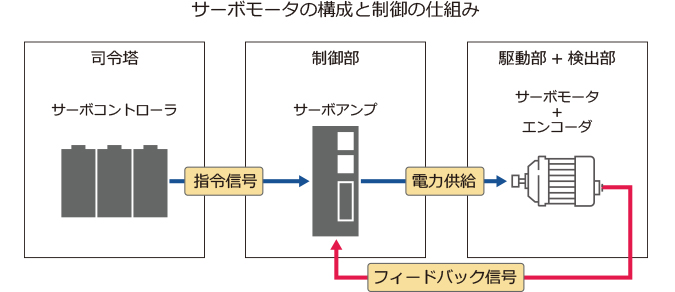
まず、司令塔であるプログラマブルコントローラから、サーボモータをどう動かすべきか「位置/速度/回転力」についての目標値が出されます。位置なら、ある目標値でピタリと止められます。速度なら、低速から高速まで、一気に目標速度まで加速することが可能です。回転力については、サーボモータにかかる力(負荷)が急に変化しても目標の回転力を維持できます。
このようなプログラマブルコントローラからの目標値を受けるのが「サーボアンプ」です。サーボアンプは、サーボモータが目標値どおりに動くために必要な出力(電力)を供給します。ただし、本当にサーボモータが指令どおりに動いたかどうかは分かりません。そこで、前述のエンコーダが実際のサーボモータの回転位置や速度を検出し、その電気信号をサーボアンプに返します。
この信号のことを「フィードバック信号」(feedback)と呼びます。図の矢印のように、エンコーダがサーボモータからの信号を摂取し(feed)、それをサーボアンプ側に戻すわけです(back)。そして、プログラマブルコントローラから出された目標値とフィードバック信号を比較して、その誤差がゼロに近づくように、サーボモータの出力をうまくコントロールしていくわけです。
図で分かるように、このような制御は、フィードバック信号がサーボアンプ側に戻され、閉じられたループを構成するため、「クローズド・ループ制御」と呼ばれています。サーボモータの最大のメリットである正確な位置/速度/回転力は、このクローズド・ループ制御によって生み出されるのです。
関連製品