人間型の双腕ロボットが製造
現場に与える
影響とは?
「人に近づけたい」という目的で
作られた双腕ロボット。
その実態と開発の経緯、
今後について探る
労働人口の減少による人手不足。
多様化するニーズに寄り添った少量多品種生産。
人間型ロボットが、それらの課題を解決すると期待されています。


人間型ロボットとも呼ばれる
「双腕ロボット」とは?

─── 富士電機機器制御(以下FCS)の「双腕ロボット」は、どこに配置されていて、何を行う、どのようなロボットなのでしょうか?
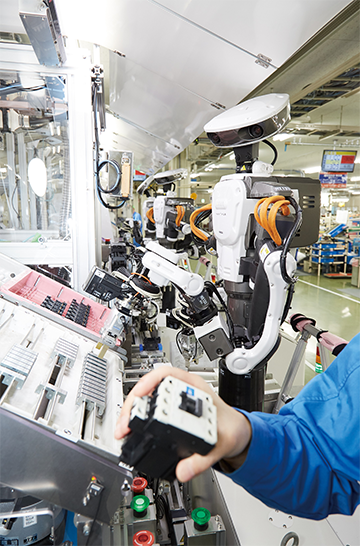
小川:基本的には工場のラインに配置されていて、マグネットスイッチ(電磁接触器)の製品組み立てを行っています。
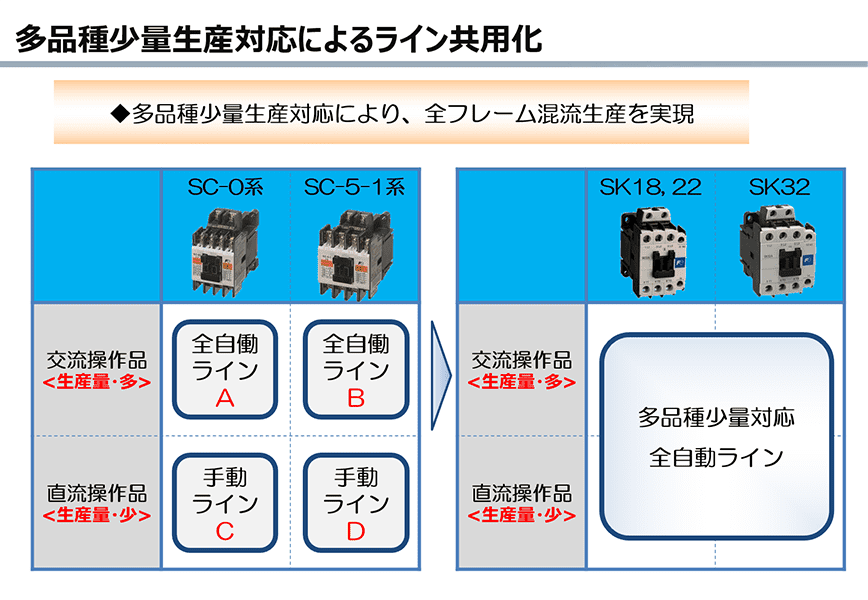
工場では、生産量の多いライン(図1(A)(B))は通常全自動となっています。全自動ラインの場合、別の製品を作りたいときは一度全自動ラインを止めて、供給する部品を入れ替える準備を行わなくてはなりません。そのため、生産量の少ない部品の場合は全自動ラインで生産すると生産効率が悪くなってしまうため、手動のラインで生産を行っていました(図1(C)(D))。
人間型ロボットは、生産量の多い製品も少ない製品も同じラインで生産することを目標として開発されました。生産ラインに流れてきた製品に対して、人間と同じように必要な部品を選び、組み立てることができることを目的としています。
─── 「双腕ロボット」とは、人間型ロボットとしてどのような特徴をもっているのでしょうか
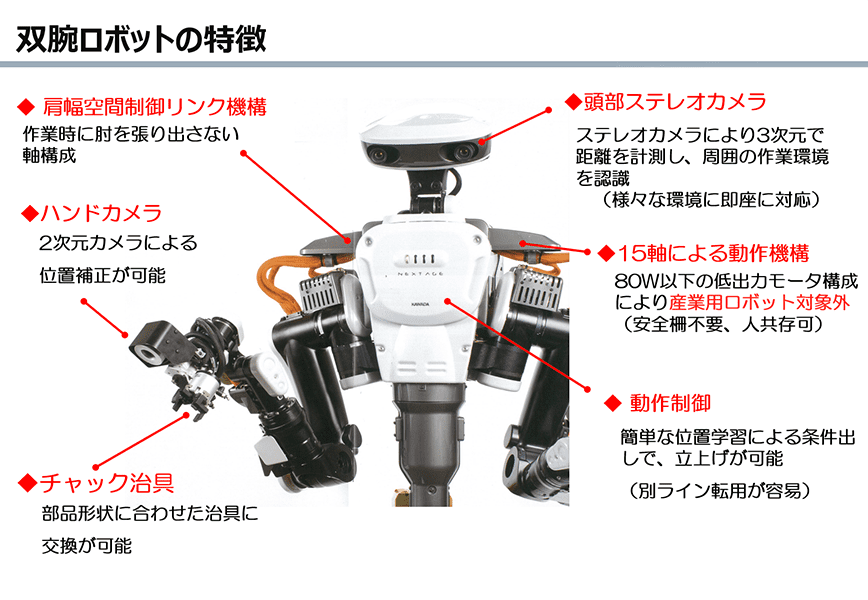
小川:二つの腕を持っている理由としては、「人に近づけたい」という思いがありました。双腕ロボットが稼働するラインは人が一緒に働く前提で作っています。従来、ロボットが稼働するラインはロボット専用に作られているものでした。そのため、ロボットが稼働するラインで人が働こうとすると、狭かったり手が届かなかったりなどの問題が発生します。しかし、今回は人とロボットを近づけるというコンセプトがあり、同じラインに人が入ることもロボットが入ることもできるようにすることを目標にしていたため、人と同じように働ける2つの腕をもったロボットになりました。
また、ロボットに作業を教えるティーチングの作業にも大きな特長があります。通常、ロボットを動かす際には専用のプログラムを作らなくてはなりません。しかし、この双腕ロボットには、簡単にプログラムを作れるようなソフトが内蔵されています。そのため、簡単な訓練をするだけでロボットに作業を教えることができるようになっているのです。これも、この双腕ロボットの特長の1つです。
─── 構造上の特長はどのようになっているのでしょうか?
小川:人の目に相当する3Dのカメラを頭部に内蔵しており、画像認識をしながら周囲環境に応じた作業を行う事ができます。さらに、チャックが交換できるようになっています。理想としては人の手と同じように、大きなものも小さなものも持てるようにしたかったのですが、技術的に難しかったため、部品の大きさや素材に応じてチャックが交換できるようになっています。このチャックの交換も、ロボット自身が自分で判断して行っています。
また、80W以下という弱いモーターを使っています。これまでのような出力の大きいロボットでは、人と接触した際に危険が大きいため、人と共存することができません。ですので、仮にロボットが間違って人の手を掴んでしまった時でも、人の手が傷まないような力になっています。一方で、重いものが持てないことや、動きが早くないなどの問題もあります。
「人と共存して同じ現場で働く」ロボット
─── 「人と共存して同じ現場で働く」ロボットには何が求められますか?
小川:主に求められるのは、安全性と柔軟性です。安全性としては、万が一、人に接触しても人がけがをしない事が求められます。
また、人が同じラインについたときには、その人がやった作業はせずに、自動的にその次の工程の作業ができるようにするなどの柔軟性が求められています。
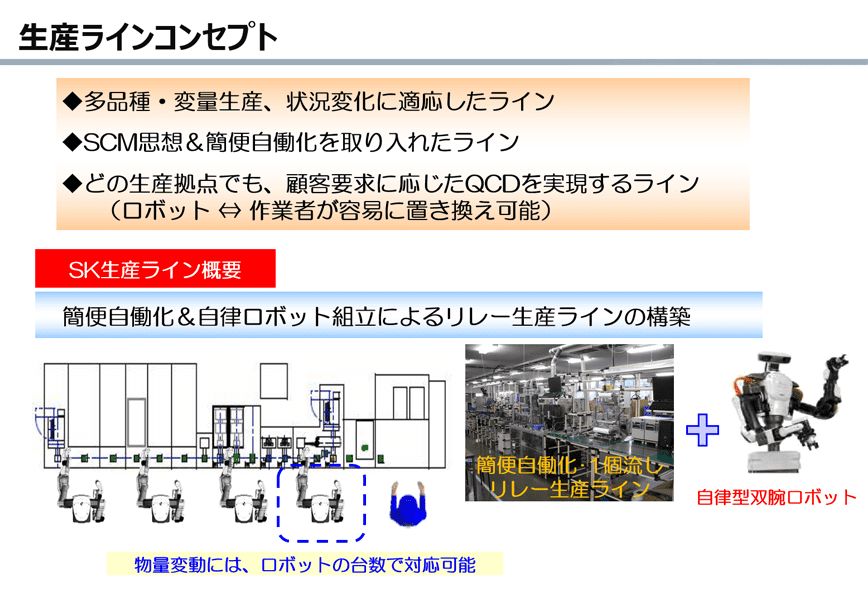
人はラインに流れてきたものや周辺の作業者の動作を見ながら、今何を作っているかや自身がやるべきことを常に判断しながら作業を行います。それと同じように、この生産ラインではロボットも流れてきた部品についているQRコードを読み込み、人と同じように動ける様になっています。
将来的には、近くに配置されたロボットの数を自動で感知し、自分たちで作業を分担して動けることを目標としています。
双腕ロボット開発について
─── このロボットを開発し、現場に配置した経緯を聞かせてください。
小川:先にもお話しましたが、生産の変動に対して柔軟に対応したいという思いがありました。
従来の産業用ロボットは、小品種大量生産という形に対応していましたが、お客様のニーズの多様化などにより、多品種少量生産が増えてきました。そのような生産状況に柔軟に対応しようと考えた場合、やはり人のようなロボットが望まれるという背景がありました

─── このロボットの開発はどのように進められたのでしょうか?
小川:ラインに導入されたのは2015年です。元々は、新しいマグネットスイッチの製品開発を行う際に、同時にまったく新しい生産ラインを作ろうとしたのがきっかけです。川田工業という会社と一緒に開発を行いました。ロボットの柔軟性に関わる、チャックの変更などについては、我々の生産技術や富士電機グループの設備技術開発部門が作り込みを行いました。
─── 開発や運用上の工夫や苦労、エピソードなどがありましたら、教えてください。
小川:最初は思うように動いてくれず、苦労をしました。製品を落としてしまったり、途中で止まったりするトラブルも多く、改善に半年ほどかかりました。また、最初のころは作業も遅く、理想的には30秒でやってほしい作業に2分かかるなどの問題もありました。そのような細かい調整などを進めていく中で、我々の中でも勉強が進み、今後への手がかりが作れたと思っています。
双腕ロボットの今後について

─── この「双腕ロボット」導入によって、どのような効果・メリットがありましたか?
小川:1つのラインで複数の製品を混流しながら生産できるようになりましたので、このロボットの当初の目的は達成できたと考えています。また、この双腕ロボットを見るために工場へお越しいただける人が増え、一種の広告塔として機能していることもメリットの1つだと思います。
─── この「双腕ロボット」導入によって、どのような効果・メリットがありましたか?
小川:今のロボットをさらにレベルアップさせていくことが、第一の目標になっています。
また、双腕ロボットで研究の進んだ画像解析などの技術が、双腕ではないものの、別の産業用ロボットの開発に転用されるなどの活用事例があります。
双腕ロボットが爆発的に増えていくのは、もう少し後になるでしょうね。今はまだ技術やノウハウの蓄積期だと考えています。
今後は労働人口の減少に伴い、ラインで働く人の確保が困難になると言われています。また、単純作業はロボットに任せて、人にはより複雑な作業に従事してもらえるような環境を作っていきたいですね。
我々は、会社としてものづくりをとても大切にしているので、外注などに頼るのではなく、できるだけ我々の内部で作っていこうという意識があります。そのため、この双腕ロボットに限らず、新しいことに挑戦しやすい土壌があります。
双腕ロボットをはじめ、我々の工場をぜひ一度ご覧ください。お待ちしております。