駆動制御機器
低圧インバータ

各種産業・分野のさまざまな用途で機能と可能性を最大限に引き出す、高信頼のラインアップ
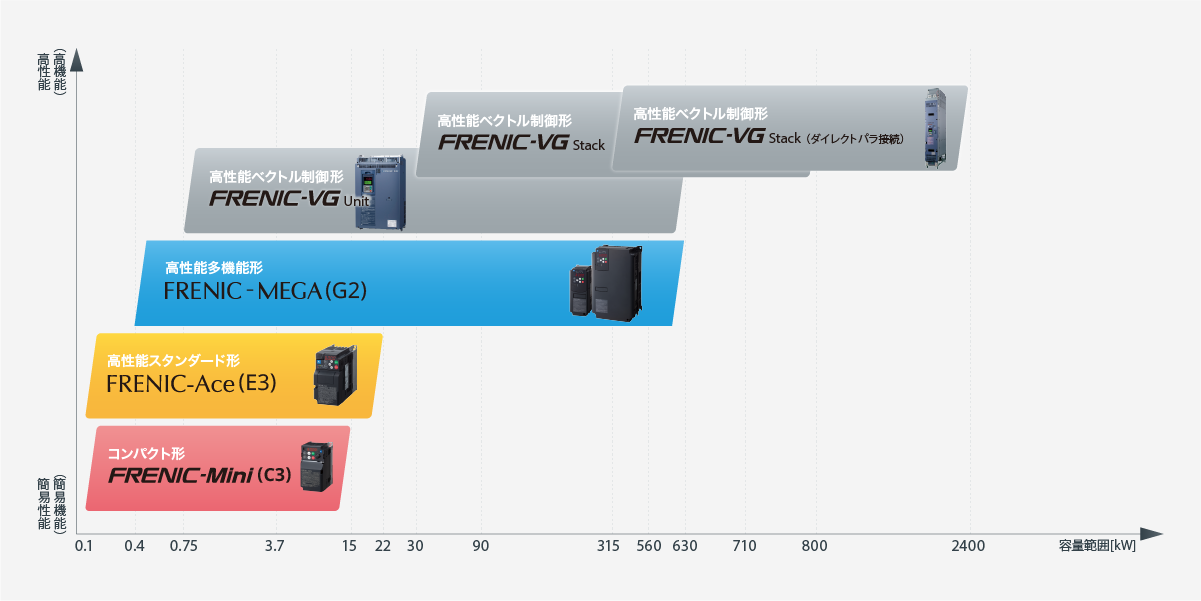
機能・性能から選ぶ
汎用インバータ
ファン・ポンプ用インバータ


エレベータ用インバータ

シリーズから探す

(ユニットタイプ)(HD仕様)
3相200V系列 0.75~90kW
3相400V系列 3.7~630kW
(スタックタイプ)(MD仕様)
3相400V系列 30~800kW
3相690V系列 90~450kW

(HHD仕様)
3相200V系列 0.4~90kW
3相400V系列 0.4~630kW

(ファン・ポンプ用 零相リアクトル内蔵タイプ)
3相200V系列 1.5~75kW
3相400V系列 1.5~75kW

(HHD仕様)
3相200V系列 0.1~22kW
3相400V系列 0.4~22kW
単相200V系列 0.1~2.2kW

3相200V系列 0.1~15kW
3相400V系列 0.4~15kW
単相200V系列 0.1~2.2kW

3相200V系列 0.1~15kW
3相400V系列 0.4~15kW
単相200V系列 0.1~2.2kW
単相100V系列 0.1~0.75kW

3相200V系列 0.75~90kW
3相400V系列 3.7~90kW

3相200V系列 5.5~22kW
3相400V系列 4.0~55kW
単相 200V系列 2.2kW

(HHD仕様)
3相200V系列 0.1~22kW
3相400V系列 0.4~22kW
単相200V系列 0.1~2.2kW
コンバータ

3相200V系列 5.5~30kW
3相400V系列 5.5~75kW

3相200V系列 5.5~22kW
3相400V系列 5.5~75kW

(ユニットタイプ)
3相200V系列 30~90kW
3相400V系列 45~630kW
用途別に探す
流体機械
工作機械
金属加工機械
搬送機械(昇降)
搬送機械(横行)
食品加工機
包装・製本機械
印刷機械
健康・医療・福祉介護機器
その他
製品紹介動画

低圧インバータサポート

資料ダウンロード
低圧インバータFAQ
ソリューション


お問い合わせ
価格、納期についてのお問い合わせやカタログ請求は当社営業または代理店にお問い合わせください。
導入前の製品の技術的なご質問も、電話、メールでお受けしております。
-
TEL
-
0120-128-220(フリーダイヤル)
-
受付時間
-
平日(月〜金曜日)AM9:00~PM7:00
土・日・祝日 AM9:00~PM5:00
(春季・夏季・年末年始の弊社休業日を除く)
製品に不都合が生じた場合は、お近くの拠点にお問い合わせください。